THE PROJECT
Introduzione
La dismetria degli arti inferiori (LLD) è una condizione relativamente comune, che può colpire sia adulti che pazienti in età pediatrica, con una prevalenza che varia tra il 21% e il 32%.
Si possono distinguere forme congenite da forme acquisite, oppure forme strutturali da forme funzionali o miste.
Il trattamento dipende dall’entità della dismetria, e deve tenere conto del fatto che il paziente abbia raggiunto o meno la maturità scheletrica.
Il gold-standard per la diagnosi e il planning pre-operatorio è rappresentato dalla teleradiografia degli arti inferiori sotto carico.
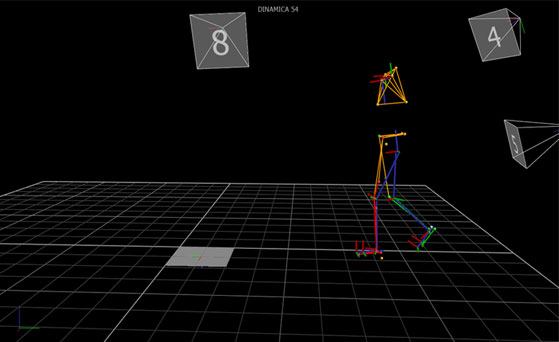
Sebbene nato per scopi diversi, anche un sistema di analisi del movimento può fornire dati interessanti; questo sistema è composto da una serie di telecamere optoelettroniche agli infrarossi che riprendono da diverse prospettive il volume di acquisizione entro cui si muove il soggetto, sul quale sono stati posti marker catarifrangenti.
Il Plug-In-Gait (PIG) sviluppato dalla VICON è un modello matematico che definisce numero e disposizione di questi marker, e che, utilizzando gli input ricevuti dalle telecamere insieme a dati forniti direttamente dall’operatore (misure antropometriche del soggetto), restituisce output cinematici e cinetici relativi a grandezze misurate nei tre piani dello spazio e rappresentati solitamente sotto forma di grafici.
Attualmente la pressochè totalità dei lavori trattanti la LLD presenta i principali meccanismi di compenso alla dismetria, senza però fornirne un’analisi quantitativa:
- inclinazione pelvica;
- flessione di ginocchio nell’arto ipermetrico (+);
- plantarflessione di caviglia nell’arto ipometrico (-).
Fanno eccezioni i lavori di Walsh del 2000 [2] e quello di Bhave del 1999 [1], che però fornisce soltanto un’analisi cinetica.
Alla luce di questa mancanza abbiamo allestito uno studio pilota finalizzato a:
- quantificare tali meccanismi di compenso da un punto di vista cinematico e cinetico, sia in condizioni statiche
che in condizioni dinamiche; - stabilire in che ordine vengano messe in atto;
- calcolarne l’efficacia tramite la creazione di un modello matematico semplificato.
Materiali e metodi
 Sono stati arruolati 10 soggetti maschi volontari sani, analizzati utilizzando i 16 marcatori previsti dal PIG per gli arti inferiori.
Sono stati arruolati 10 soggetti maschi volontari sani, analizzati utilizzando i 16 marcatori previsti dal PIG per gli arti inferiori.
Ciascun soggetto è stato sottoposto ad una prova statica, prima senza rialzo e poi con rialzo crescente (10, 20, 25, 30 e 50 mm), testando i tre meccanismi di compenso.
Successivamente, la prova dinamica è stata condotta secondo il medesimo schema.
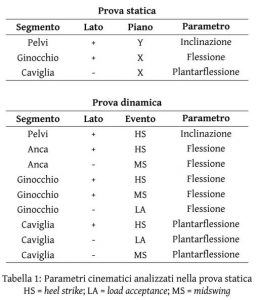
Durante la prova statica e dinamica sono stati analizzati i parametri cinematici presentati nella tabella 1; nella prova statica sono stati inoltre calcolati i parametri riassuntivi ε (rapporto tra parametro misurato e rialzo utilizzato al momento della misura) e ν (rapporto percentuale tra la correzione ottenuta secondo il modello matematico ed il rialzo applicato)
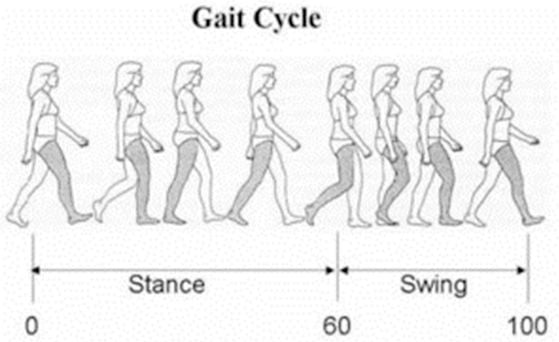
Per la prova dinamica sono stati calcolati i parametri spazio-temporali previsti dai protocolli internazionali di gait
analysis e i due picchi della componente verticale della forza di reazione al suolo (GRFV1 e GRFV2), oltre alla loro differenza ed il loro rapporto λ.
Risultati
Vengono qui riportati i risultati significativi ottenuti nel corso dello studio 1.
I dati relativi all’inclinazione pelvica, alla flessione del ginocchio e alla plantarflessione di caviglia nella prova statica sono riportati nella tabella 2.
Dei parametri spazio-temporali e cinematici durante la prova dinamica, l’unico a presentare una differenza significativa all’aumentare del rialzo è stata la durata dello stride a carico dell’arto ipometrico: 1.20, 1.21, 1.24, 1.27, 1.26 e 1.25 m rispettivamente.
I dati realtivi ai due parametri cinetici GRFV1 e GRFV2 sono riportati nella tabella 3.


Conclusioni
Alla luce di quest’esperienza, è possibile concludere che in condizioni statiche:
- l’inclinazone pelvica viene messa costantemente in atto con un’efficacia decrescente (picco a 30 mm);
- la flessione del ginocchio viene messa in atto per minimi rialzi con un’efficacia decrescente (minima a 30 mm);
- la plantarflessione di caviglia viene messa in atto per rialzi maggiori, seppur contribuendo meno al compenso della dismetria rispetto alla pelvi e al ginocchio, con un’efficacia crescente all’aumentare del rialzo.
Durante la prova dinamica i parametri cinematici analizzati variano generalmente meno rispetto a quanto registrato durante la prova statica, verosimilmente per la difficoltà di selezionare un meccanismo di compenso a scapito degli altri.
I parametri cinetici mostrano un maggior lavoro a carico dell’arto ipometrico, sia al momento dell’accettazione del carico che al momento del push-off.
Al termine di questo studio appare evidente quali possano essere i suoi sviluppi futuri: ampliamento e stratificazione del campione arruolato, applicazione dello stesso protocollo a soggetti affetti da dismetria reale degli arti inferiori, inclusione dello studio dei movimenti del centro di massa, ampliamento del PIG per lo studio del rachide.
Riferimenti bibliografici
[1] Bhave A, Paley D, Herzenberg J. Improvement in gait parameters after lengthening for the treatment of limb-length discrepancy. J Bone Joint Surg Am, 81(4):529–534, 1999.
[2] Walsh M, Connolly P, Jenkinson A, O’Brien T. Leg length discrepancy–an experimental study of compensa-
tory changes in three dimensions using gait analysis. Gait Posture, 12(2):156–161, 2000.